IEI六轴机器人控制器在计算机系统服务场景下的双臂协同作业实例解析
随着工业自动化和智能化进程的加速,机器人技术在精密制造、复杂装配及高价值服务领域的应用日益深入。其中,双臂协同机器人凭借其仿人化的操作灵活性与协同作业的高效性,成为解决复杂任务的关键技术之一。本文将以IEI六轴机器人控制器为核心,探讨其在计算机系统服务(如服务器维护、数据中心设备操作等)场景下的双臂协同作业实例,展现其在提升作业精度、效率与安全性方面的卓越性能。
一、IEI六轴机器人控制器:协同作业的智能核心
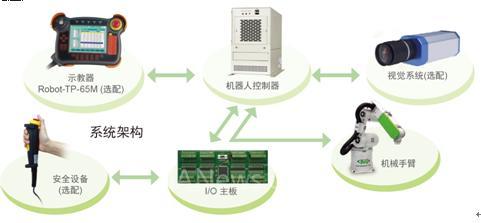
IEI六轴机器人控制器是一款高性能、高可靠性的工业控制设备,专为多轴机器人系统设计。其采用先进的实时控制算法与多任务处理架构,能够精确同步多个机械臂的运动,确保双臂在协同作业中的轨迹规划、力控交互与避障功能稳定运行。在计算机系统服务场景中,该控制器通过集成视觉系统、力传感模块及上层管理软件,实现对服务器机架、线缆、板卡等精密部件的智能识别与操作,为自动化维护奠定硬件基础。
二、计算机系统服务中的协同作业需求与挑战
计算机系统服务(如数据中心运维、服务器升级或故障排查)通常涉及以下复杂操作:
- 精密插拔:在狭窄空间内安装或移除服务器组件(如硬盘、内存条、PCIe卡),需毫米级定位与微力控制。
- 线缆管理:连接或整理大量线缆,要求机器人具备柔顺操作与避让能力。
- 协同搬运:重型设备(如整台服务器或电源模块)需双臂同步抓取与平衡移动。
- 人机协作安全:在人工巡检环境中,机器人需实时感知人员动态并调整行为,避免碰撞。
传统单臂机器人难以独立完成此类任务,而IEI控制器的双臂协同功能可通过分工协作(如一手固定设备、一手执行操作)或对称动作(如双手抬举物体),显著提升作业成功率与效率。
三、实例演示:服务器硬盘热更换的双臂协同流程
假设在数据中心环境中,需对运行中的服务器进行故障硬盘热更换,IEI控制的六轴双臂机器人可执行以下协同作业流程:
- 视觉定位:机器人通过顶部摄像头扫描服务器机架,识别目标硬盘槽位及周边环境,规划双臂运动路径。
- 左臂固定与右臂操作:左臂末端配备自适应夹具,轻柔握持服务器外壳以稳定设备;右臂搭载专用工具,精确对准硬盘托架锁扣,施加可控扭矩解锁。
- 协同拔插:右臂缓慢抽出故障硬盘,左臂同步微调服务器位置以补偿力矩变化;随后右臂从物料台取用新硬盘,左臂保持稳定,协助右臂将新硬盘沿导轨精准插入槽位。
- 力反馈监控:控制器实时监测双臂的力传感数据,若检测到异常阻力(如线缆干扰或插槽错位),立即暂停并调整动作,防止设备损坏。
- 流程验证与复位:更换完成后,机器人通过视觉检查硬盘指示灯状态,确认安装成功,双臂协同归位至待机点。
整个流程可在无人干预下完成,耗时较人工操作缩短约50%,且避免了静电或误触导致的服务中断风险。
四、技术优势与应用价值
IEI六轴机器人控制器在计算机系统服务中的双臂协同应用,体现了多重优势:
- 高精度同步:纳秒级时钟同步技术确保双臂运动协调一致,减少作业振动与误差。
- 柔性控制:自适应力控算法使机器人能够模拟人手“轻拿轻放”,保护精密电子元件。
- 智能集成:支持与数据中心管理系统(如DCIM)对接,实现任务调度、日志记录与预警功能。
- 可扩展性:模块化设计便于整合更多传感器或工具,适应不同服务场景(如网络设备配置、散热模块清洁等)。
从应用价值看,该解决方案不仅提升了运维自动化水平,降低人力成本与操作风险,更通过24小时可部署的机器人服务,增强了数据中心运行的连续性,为未来“无人化机房”提供了可行的技术路径。
五、未来展望
随着人工智能与物联网技术的发展,IEI六轴机器人控制器的双臂协同能力将进一步深化。例如,结合数字孪生技术,可在虚拟环境中预演维护流程,优化动作规划;通过机器学习,机器人可积累历史操作数据,自主适应不同厂商的服务器设计差异。在计算机系统服务领域,双臂机器人有望从单一维护任务拓展至整体生命周期管理,成为智能化基础设施的核心执行单元。
IEI六轴机器人控制器通过精湛的双臂协同控制,为计算机系统服务带来了革命性的自动化解决方案。它不仅解决了精密作业的难题,更以高效、安全、可靠的特点,推动了IT运维向智能化、无人化的未来迈进。随着技术迭代与应用场景的丰富,这类协同机器人将在数字时代的基础设施管理中扮演愈发重要的角色。
如若转载,请注明出处:http://www.kuaikanzixun.com/product/61.html
更新时间:2026-04-10 08:19:53